A project carried out by Jakub Miętus.
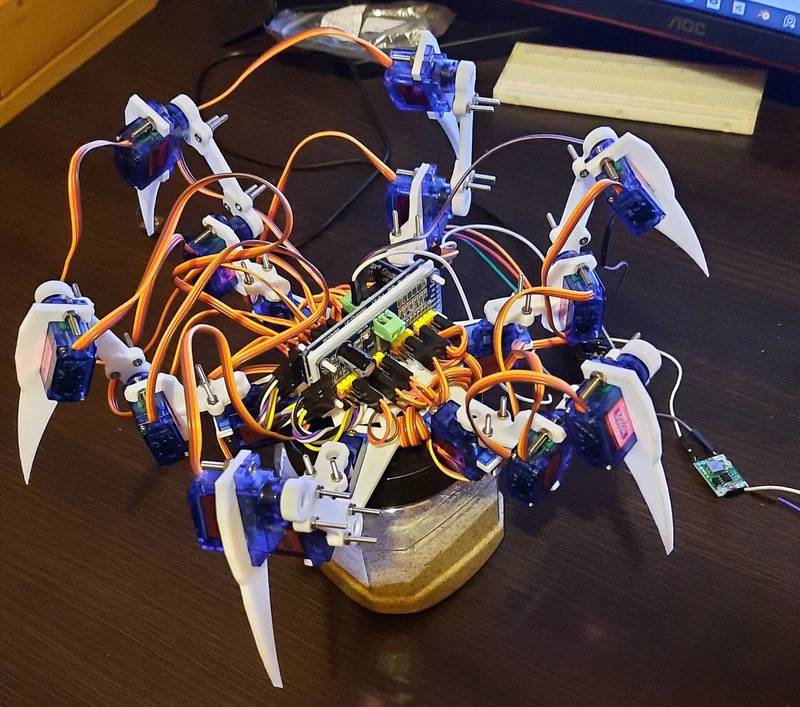
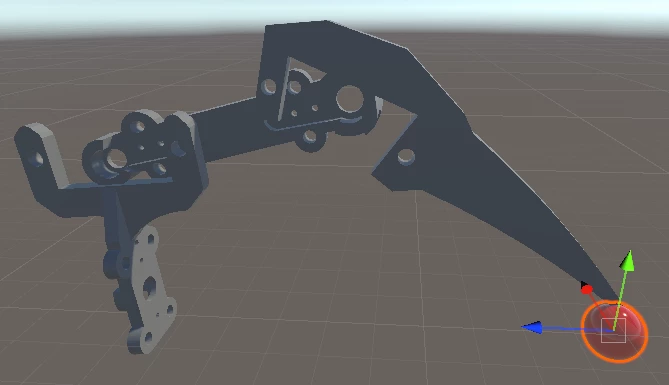
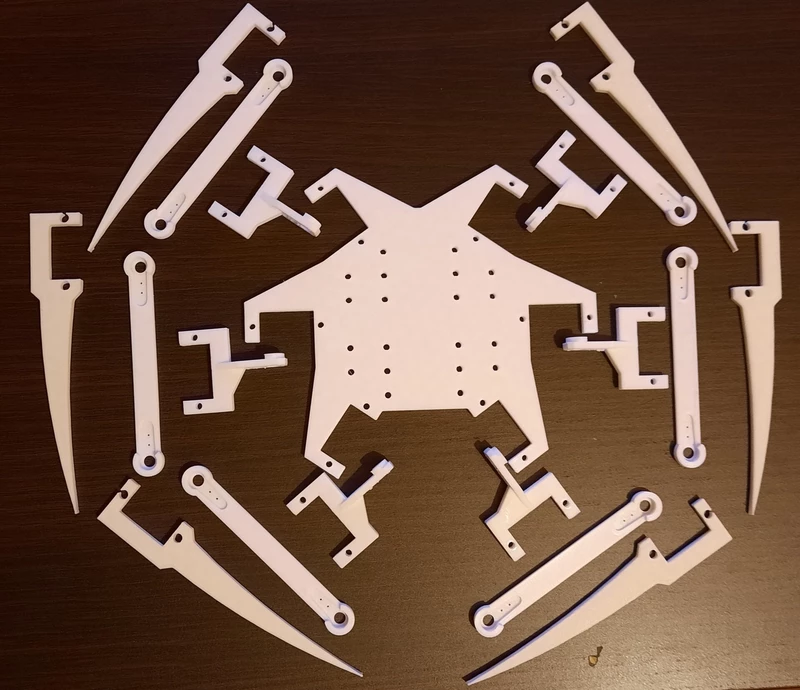
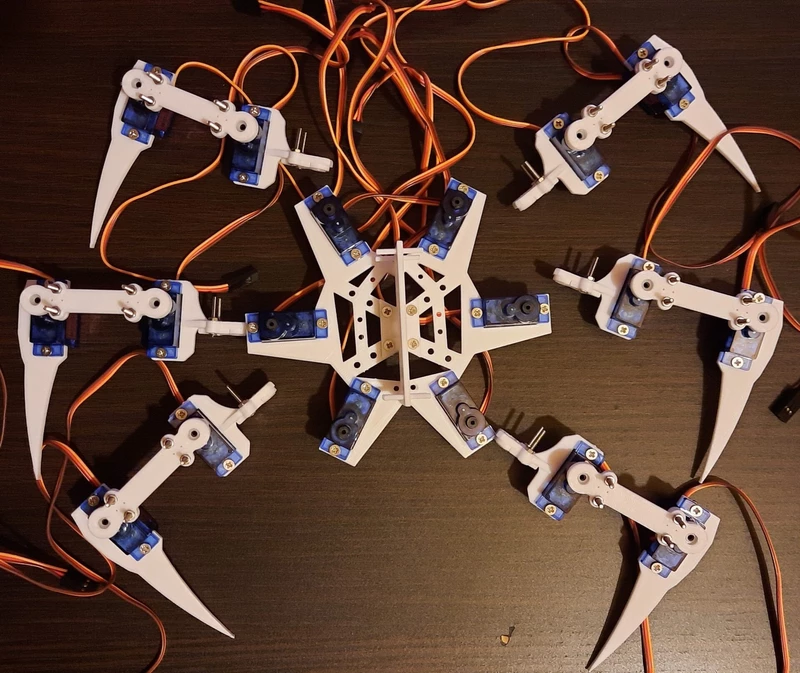
As part of the work, he made a 3D model of the robot and conducted the necessary simulations. Elements of the structure were made in 3D printing technology. At present, the biggest challenge is to programme the motion sequence in the best possible way.
The FABRIK algorithm (Forward And Backward Reaching Inverse Kinematics) was tried, but it did not give satisfactory results.
It was therefore decided to develop its own solution by determining the geometry of the legs for the proposed coordinate systems. Currently, the movement sequence consists of three parts:
Currently, the movement of the hexapod is implemented according to the Wave “matrix”.

2021 © Koło Naukowe Inżynier XXI wieku. Wszystkie prawa zastrzeżone.
