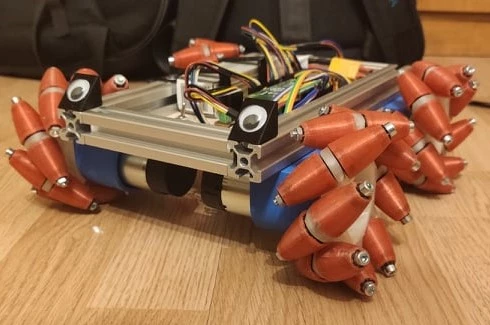
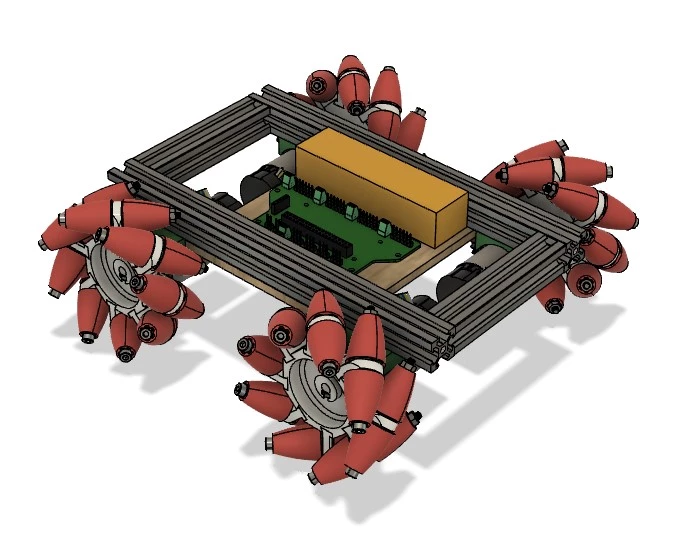
Napęd omnikierunkowy jest typem napędu holonomicznego. W przypadku takiego rozwiązania występuje związek pomiędzy liczbą stopni swobody dostępnych i kontrolowanych. Napęd ten jest wykorzystywany w robotach mobilnych i pojazdach aby zwiększyć ich zwrotność. Znajduje on zastosowanie szczególnie w gęsto zagospodarowanych przestrzeniach, na przykład magazynach.
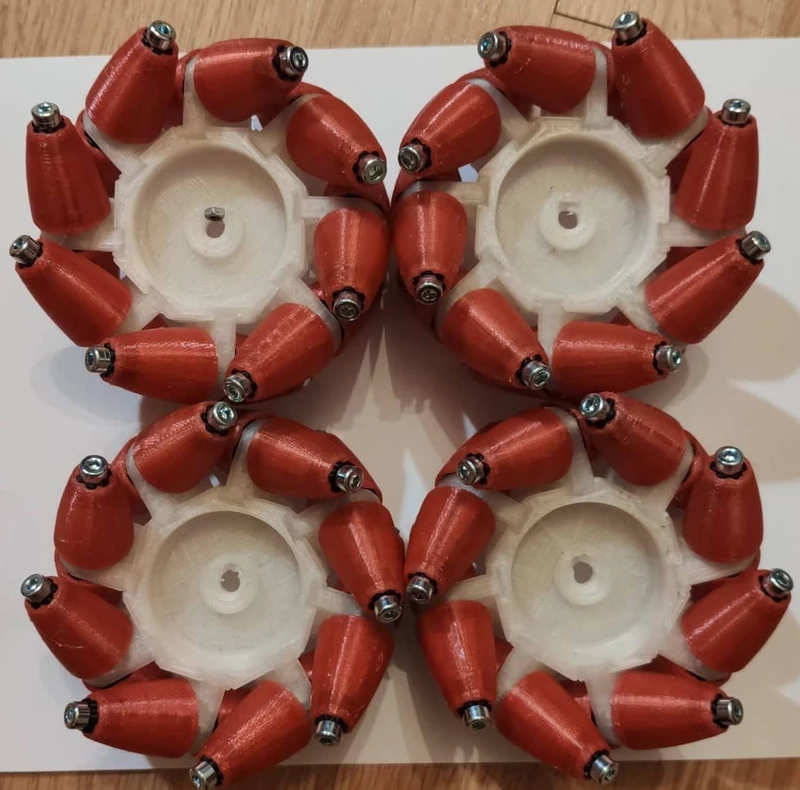
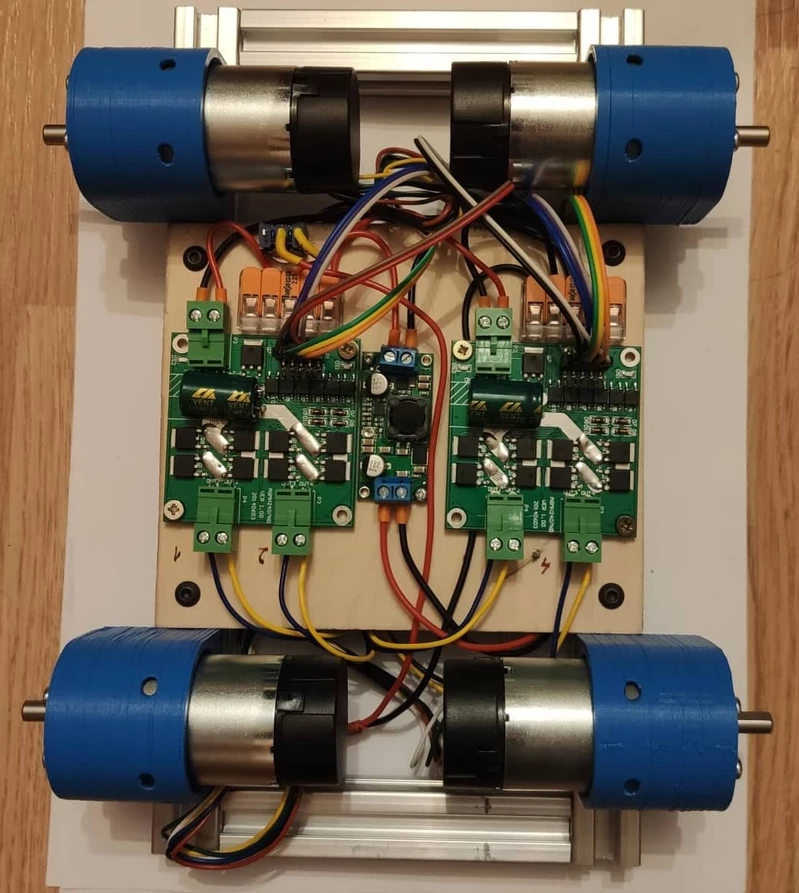
Jest to kolejny projekt realizowany przez Damiana Pytkę, który przygotował kompletną dokumentację techniczną. Obecnie robot mobilny jest złożony i uruchomiony. Piasty kół oraz wszystkie rolki wykonano w technologii druku 3D.
2021 © Koło Naukowe Inżynier XXI wieku. Wszystkie prawa zastrzeżone.
