Poniżej prezentujemy wybrane projekty zakończone lub realizowane w ramach prac koła od stycznia 2018 do kwietnia 2019.
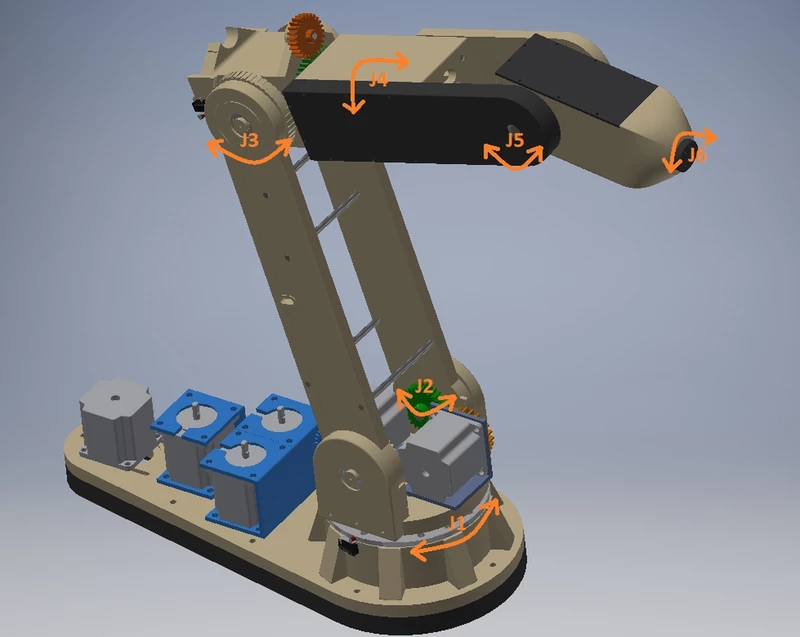
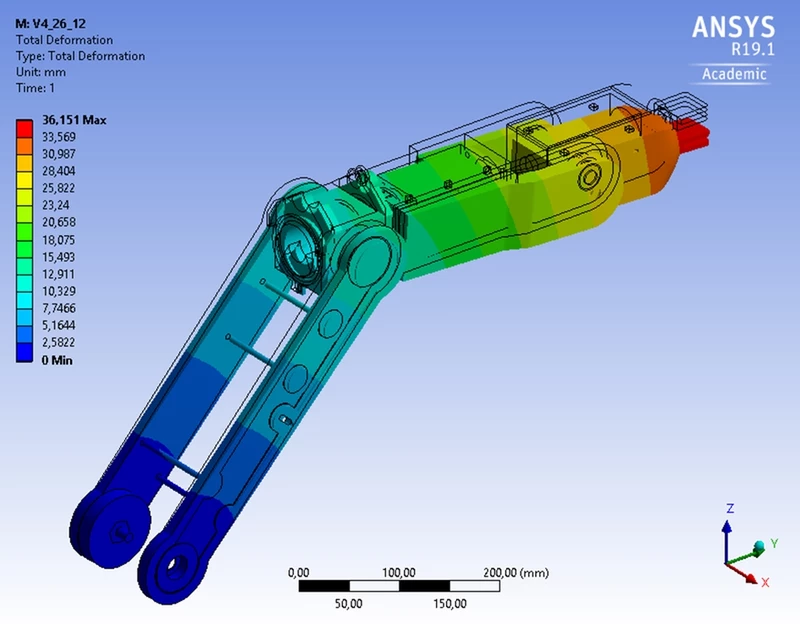
Projekt robota antropomorficznego o 6-ciu stopniach swobody
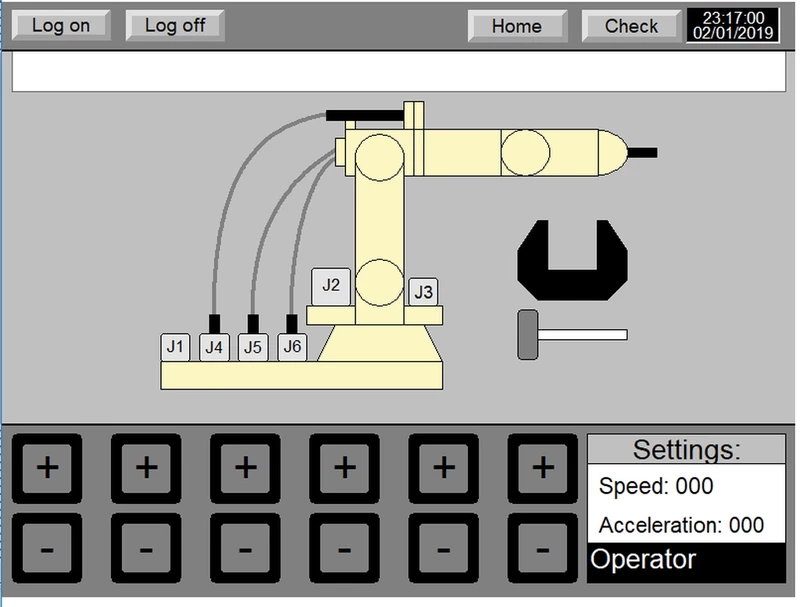
Celem pracy było wykonanie robota antropomorficznego o 6-ciu stopniach swobody. Prototyp został wykonany w technologii druku 3D, obliczenia sprawdzające wykonano w systemie ANSYS, układ sterujący wykorzystuje sterownik PLC Horner oraz modułu Arduino Mega 2560 z mikrokontrolerem.
Program sterujący napisano w oprogramowaniu Arduino IDE w języku C++. Wizualizację wykonano w oprogramowaniu Proficy Mechanical Edition View 9.5. Komunikacja odbywa się pomiędzy oprogramowaniem Proficy, sterownikiem PLC oraz płytką Arduino. Wykorzystane protokoły komunikacyjne to Modicon TCP oraz Modbus RTU.
Osiągnięcia:
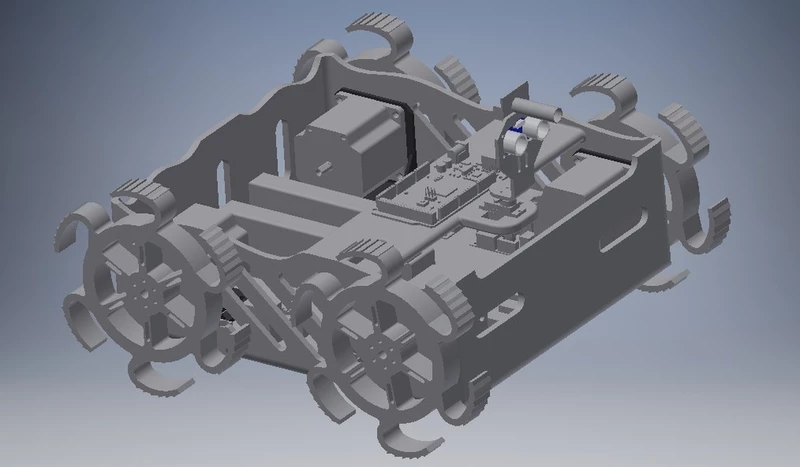
Projekt robota typu RHex
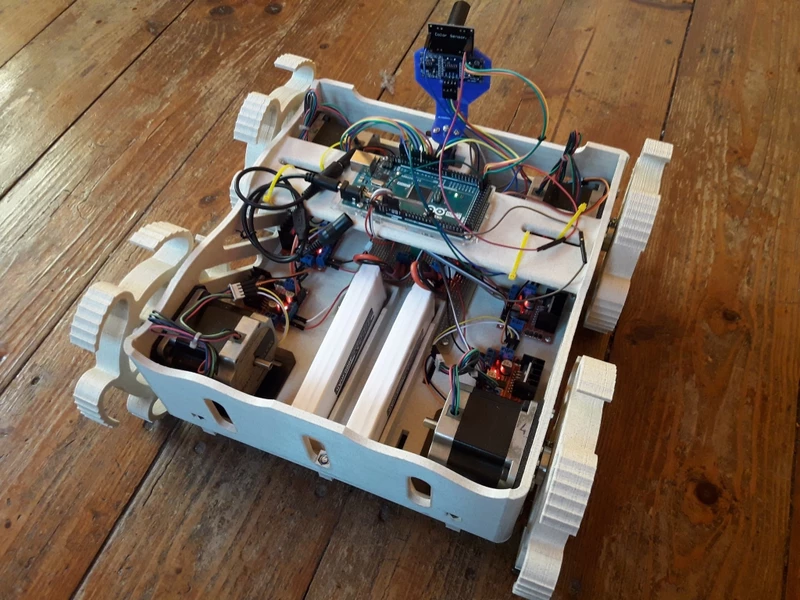
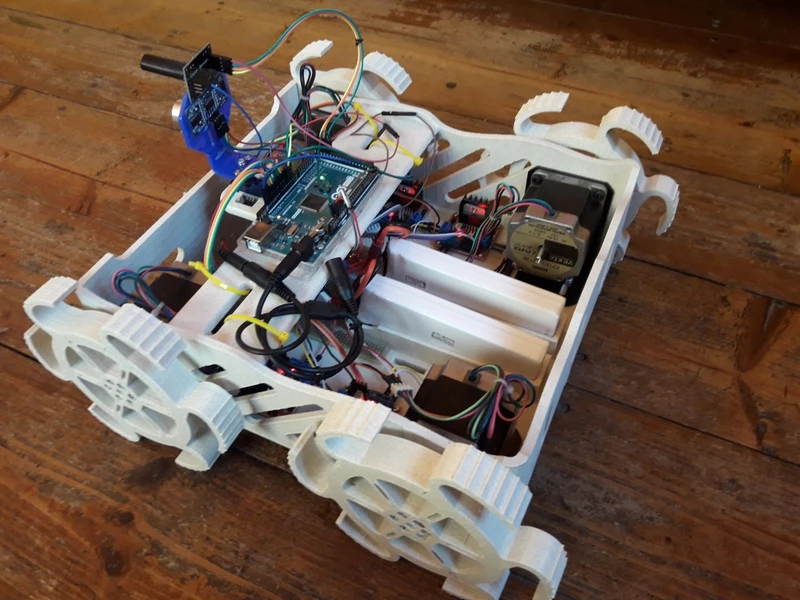
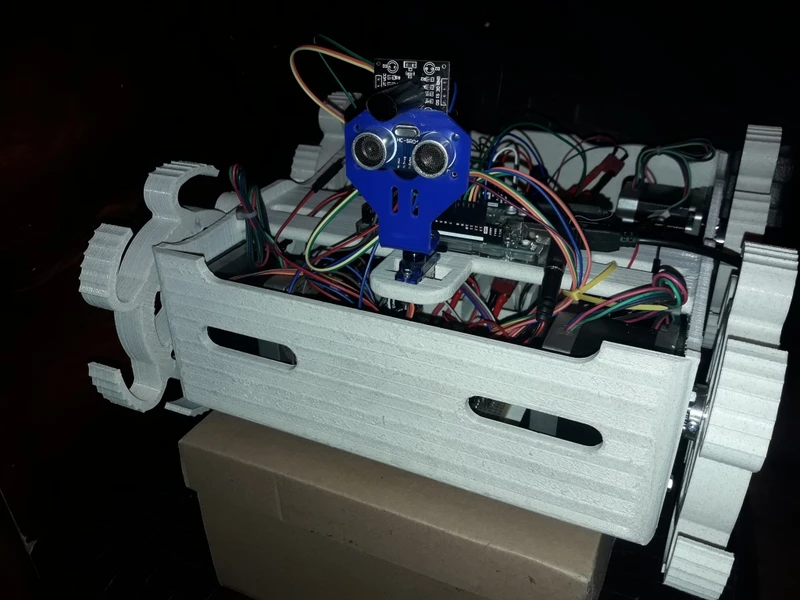
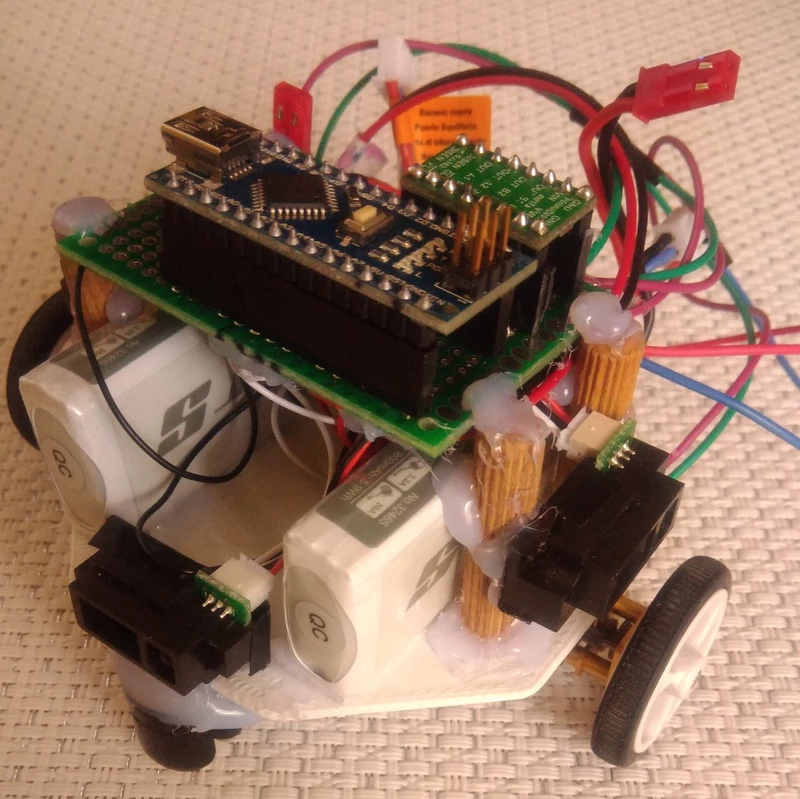
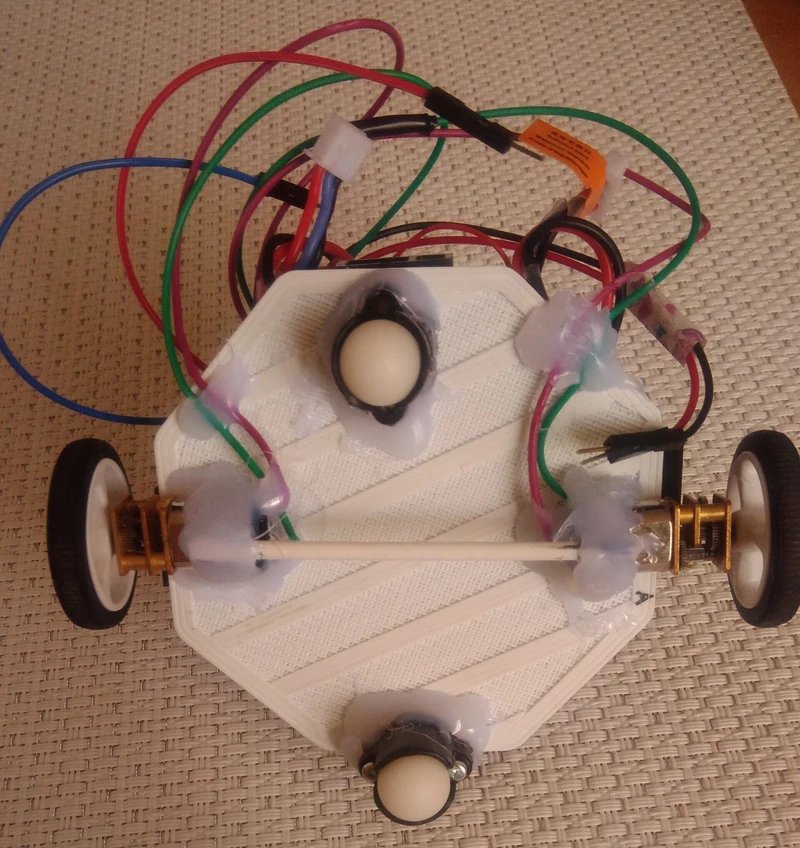
Celem pracy było zaprojektowanie i budowa platformy robota mobilnego o konstrukcji podobnej do zbudowanej już w zakładach firmy Boston Dynamics – robota RHex, którego sterowanie jest realizowane za technologii Bluetooth i światła laserowego.
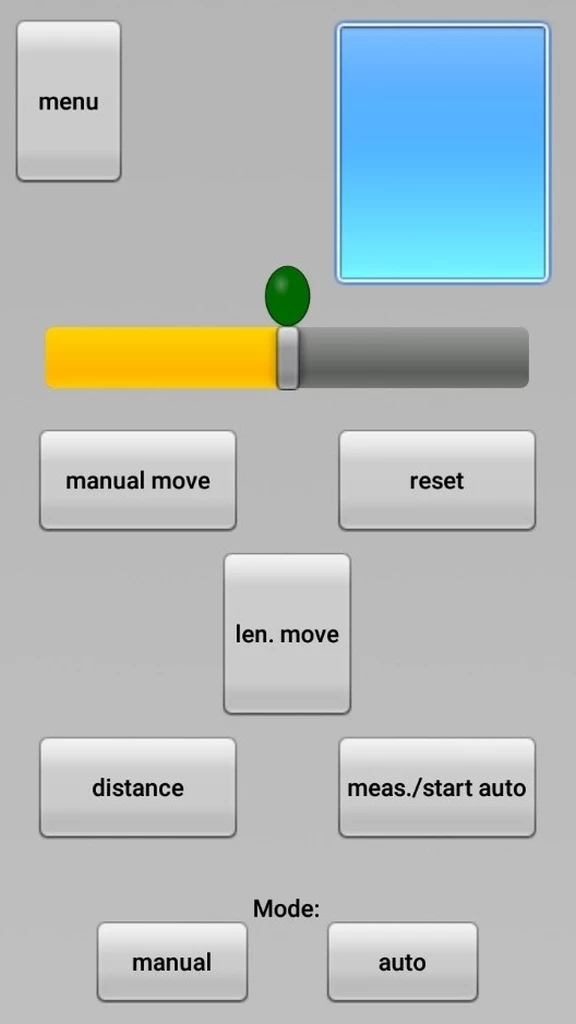
Czujniki zbierają informacje o otoczeniu, aplikacja na telefon komórkowy zadaje parametry dotyczące pracy robota, a światło lasera nadaje kierunek, w którym się on porusza.
W trybie ręcznym, do sterowania robota przygotowano aplikację na smartfon.
Osiągnięcia: Międzynarodowe Zawody Robotów ROBOTIC TOURNAMENT’2019 – III miejsce
Robot Hector
Osiągnięcia:
IX Robomaticon Politechnika Warszawska – II miejsce
XI ROBOTIC ARENA Politechnika Wrocławska – II miejsce
Projekt robota typu MicroMouse
Celem pracy było zaprojektowanie i budowa platformy robota mobilnego, który podczas zawodów weźmie udział w konkurencji MicroMouse.
Micromouse to rodzaj zawodów robotów, w których robot “mysz” ma do pokonania labirynt złożony z płaskiej powierzchni i ułożonych pojedynczych ścianek (wg Wikipedia).
W ramach realizowanych prac dobrano napęd, wykorzystano układ Arduinio do sterowania urządzeniem, napisano aplikację sterującą oraz zapamiętującą daną trasę.
Osiągnięcia: Międzynarodowe Zawody Robotów ROBOMATICON odbywających się na Politechnice Warszawskiej – II miejsce
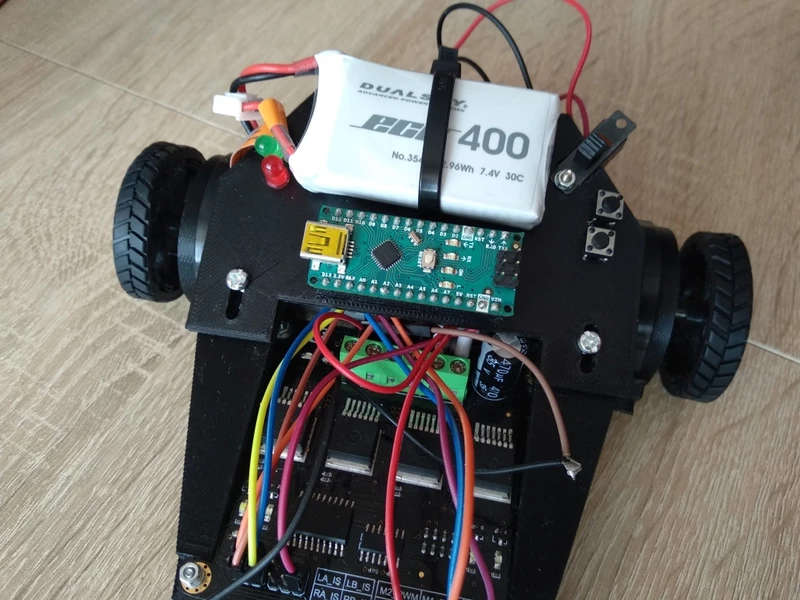
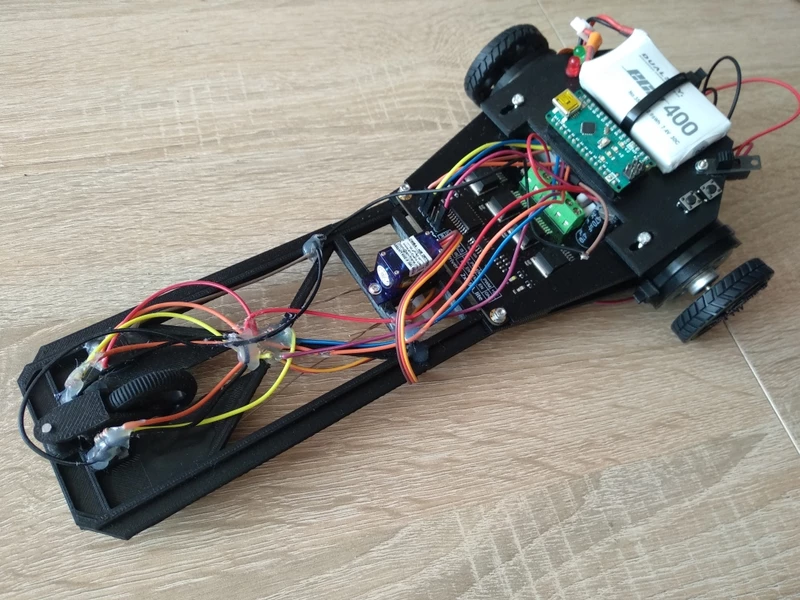
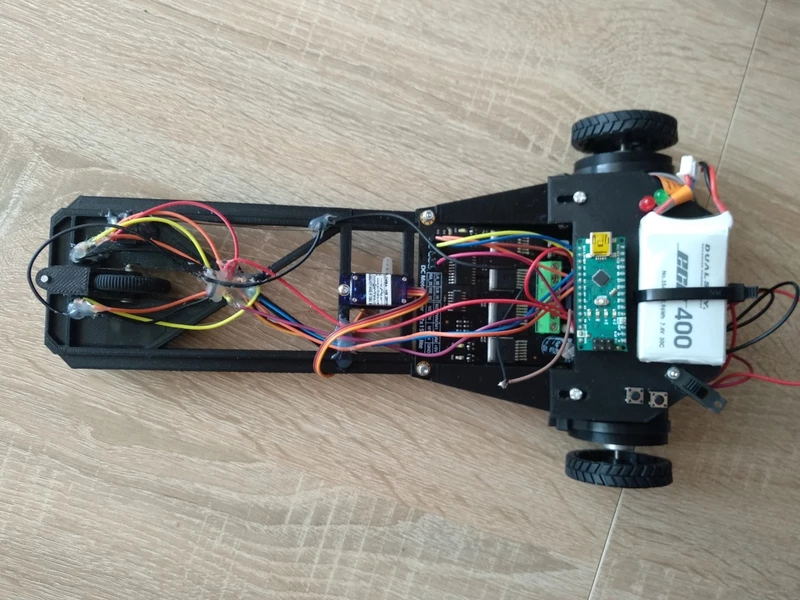
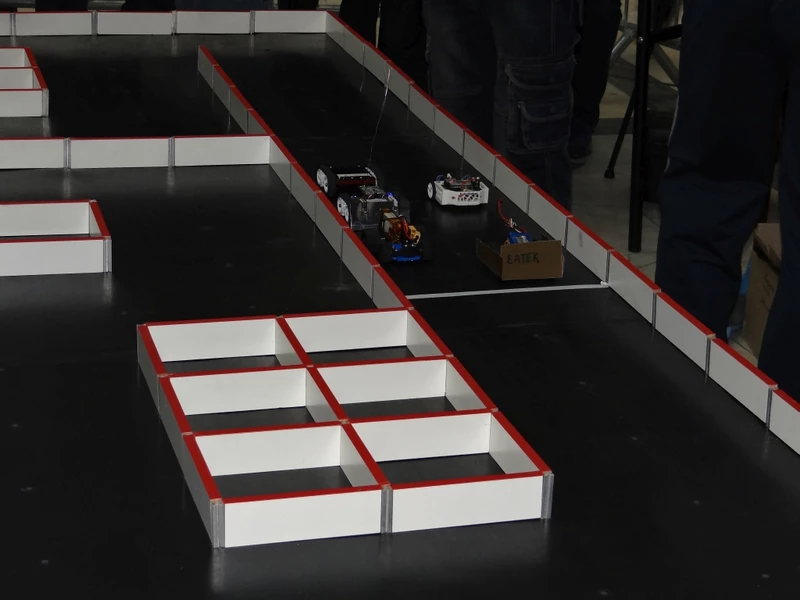
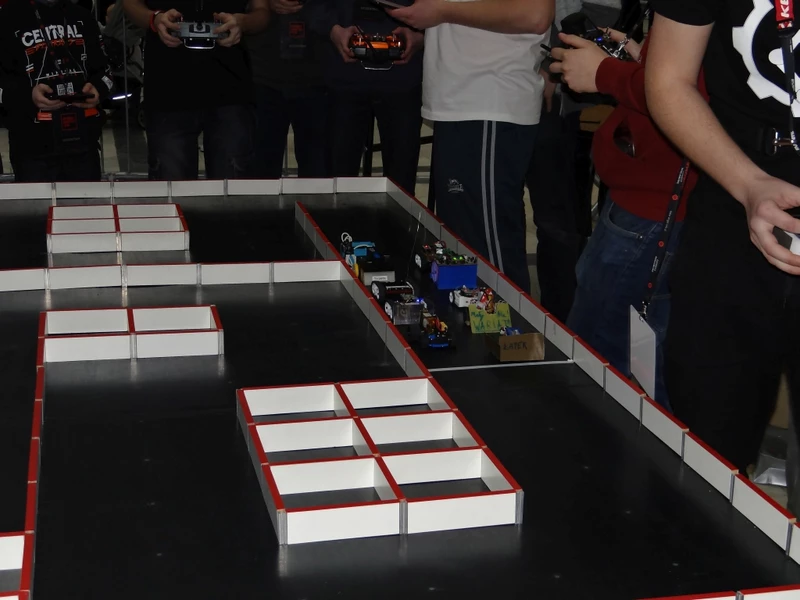
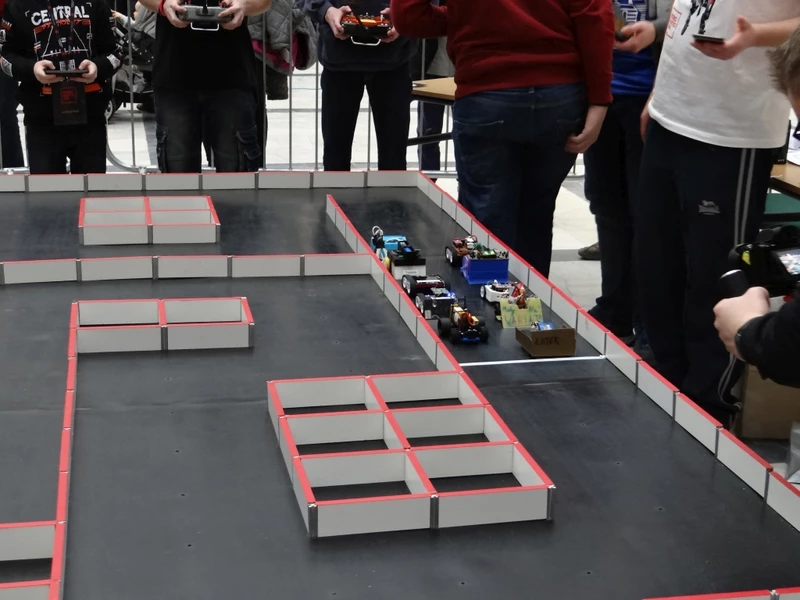
Projekt robota do udziału w zawodach w konkurencji DeathRace
Głównym celem konkurencji DeathRace jest jak najszybsze ukończenie 4 okrążeń wyznaczonej trasy. Roboty walczą o zajęcie pierwszego, drugiego i trzeciego miejsca. Kwalifikacje decydują o miejscach startowych w finale. Finał rozstrzyga o miejscach na podium.
W ramach realizowanych prac wykonano platformę robota, dobrano napęd oraz zestaw czujników, wykorzystano układ Arduinio do sterowania urządzeniem, napisano aplikację sterującą.
Osiągnięcia: Międzynarodowe Zawody Robotów ROBOMATICON odbywających się na Politechnice Warszawskiej – IV miejsce
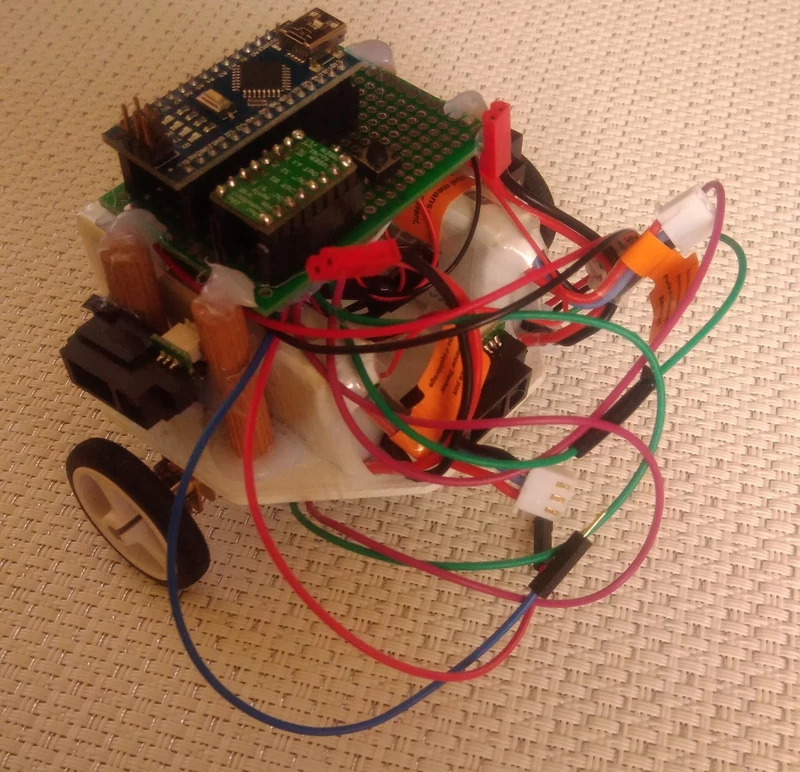
Projekt robota do udziału w konkurencji DragRace
Celem pracy było zaprojektowanie i budowa platformy robota mobilnego, który podczas zawodów weźmie udział w konkurencji DragRace.
Robot w konkurencji DragRace musi pokonać prosty odcinek trasy szybciej, niż rywal. Zwycięzcą zostaje robot, który przejedzie trasę w jak najkrótszym czasie.
Konkurencja porównywana jest z zawodami samochodów na odcinku ¼ mili.
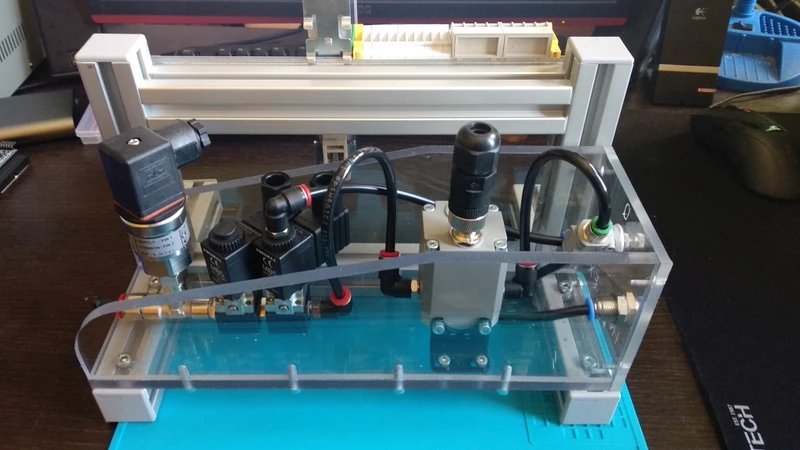
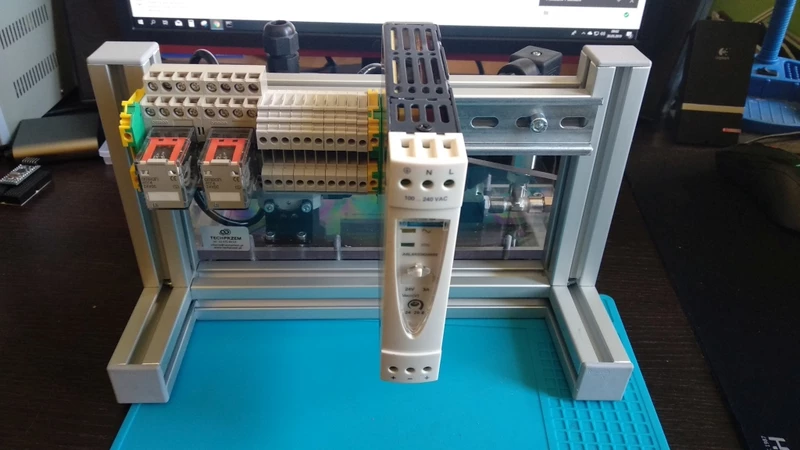
Projekt oraz wykonanie stanowiska do przeprowadzania testów szczelności układów pneumatycznych
W ramach prowadzonych prac wykonano model oraz zbudowano stanowisko przeznaczone do przeprowadzania testów szczelności układów pneumatycznych. W rozwiązaniu zastosowano najnowsze elementy automatyki przemysłowej – w pełni programowalne.
Dobrano układ zasilania oraz sterowania. Napotkano na problem związany z obsługą sterownika Horner XL6e, obecnie zdecydowano się na sterownik Astrada. W zależności od zastosowanego rozwiązania, wizualizacja będzie wykonana na panelu operatorskim lub w systemie SCADA.
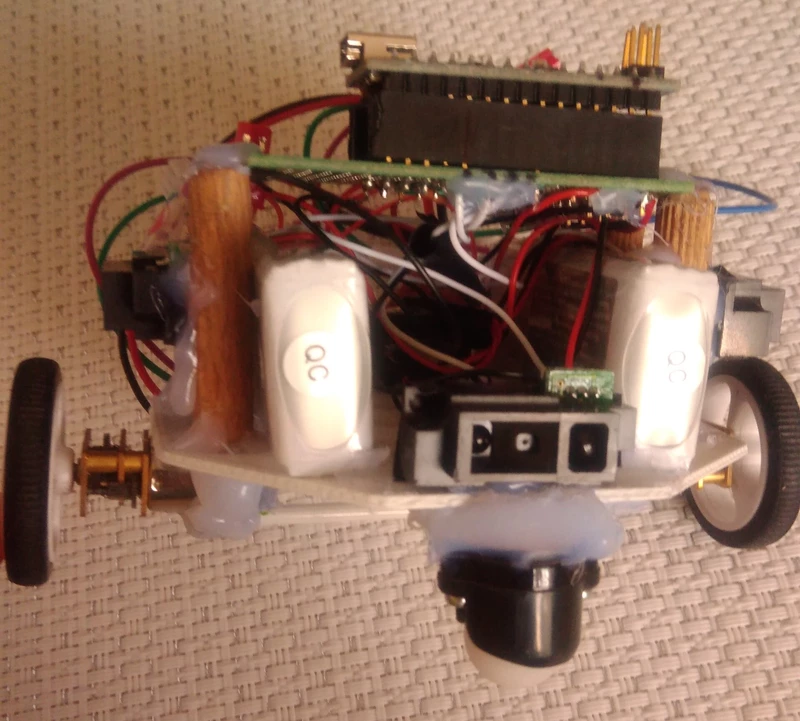
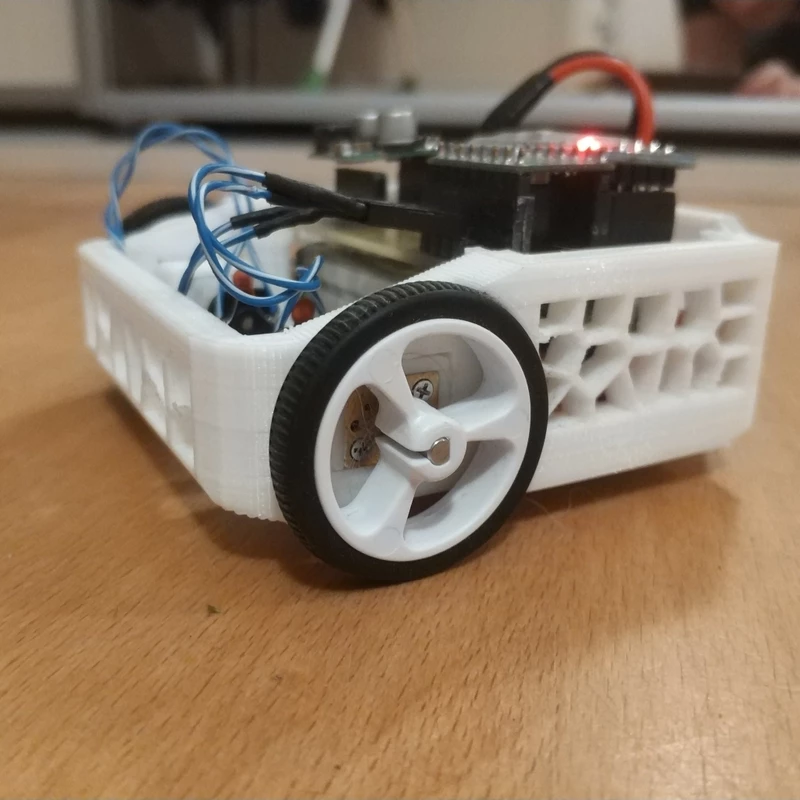
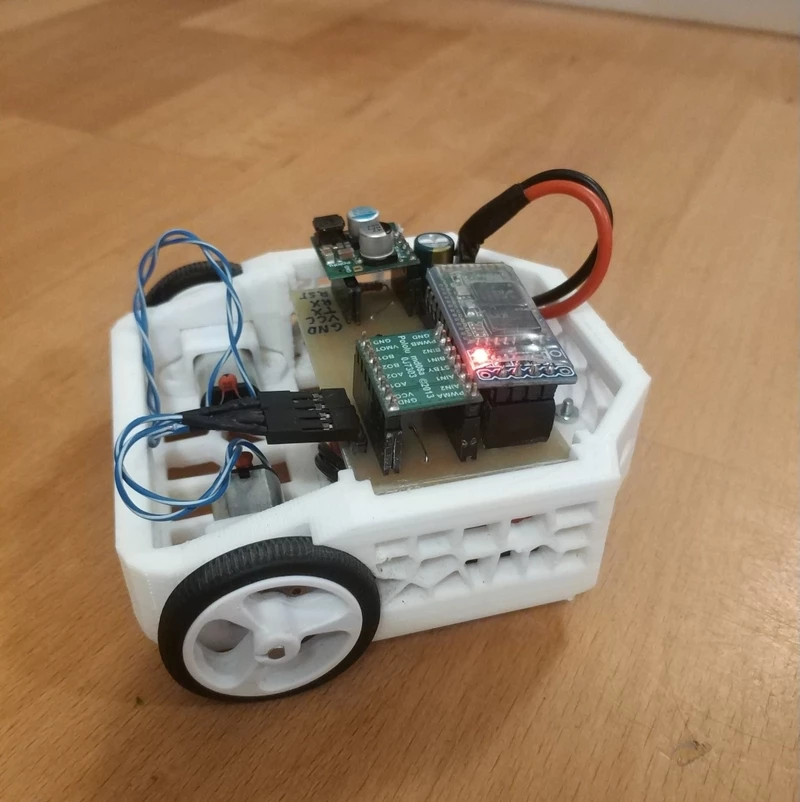
Projekt robota do udziału w konkurencji LineFollower
Celem pracy było zaprojektowanie i budowa platformy robota mobilnego, który podczas zawodów weźmie udział w konkurencji LineFollower.
LineFollower – (Linefollowery) to roboty startujące w zawodach, których zadaniem jest przejechanie wyznaczonej trasy w jak najkrótszym czasie, roboty ścigają się na białym podłożu z czarną trasą (lub odwrotnie) [na pods. Leksykonu robotyki].
W ramach realizowanych prac wykonano platformę robota, dobrano napęd oraz zestaw czujników, wykorzystano układ Arduinio do sterowania urządzeniem, napisano aplikację sterującą.
Projekt i budowa inteligentnego domu
Celem pracy jest wykonanie układu sterowania urządzeniami w pomieszczeniu mieszkalnym poprzez sieć Ethernet. Obejmuje ona również wykonanie wizualizacji oraz projektu układu wykonawczego.
Projekt sterowania ma być dostosowany do infrastruktury rzeczywistego obiektu mieszkalnego. Układ sterujący pozwoli na sterowanie oświetleniem, żaluzjami. Obiekt mieszkalny będzie posiadał czujniki temperatury oraz natężenia światła (wykonujące pomiar w pomieszczeniu oraz na zewnątrz), dzięki którym będzie możliwy monitoring oraz automatyzacja wybranych procesów. Automatyzacji będzie podlegało sterownie oświetleniem głównym (zapalanie się wybranych świateł po wykryciu ruchu), oświetleniem podłogowym (włączanie się oświetlenia po zmroku) oraz sterowanie żaluzjami (otwieranie/zamykanie żaluzji w zależności od poziomu natężenia światła na zewnątrz).
Obecnie wybrano elementy automatyki budynkowej, wykonano model pomieszczenia.
Projekty w początkowej fazie realizacji
1. Projekt i wykonanie zdalnie sterowanego pojazdu
2. Projekt i wykonanie modelu teleoperatora
3. Projekt i wykonanie bezzałogowego statku powietrznego
4. Projekt i wykonanie modelu dźwigu osobowego













2021 © Koło Naukowe Inżynier XXI wieku. Wszystkie prawa zastrzeżone.
