Projekt realizowany przez Jakuba Miętusa.
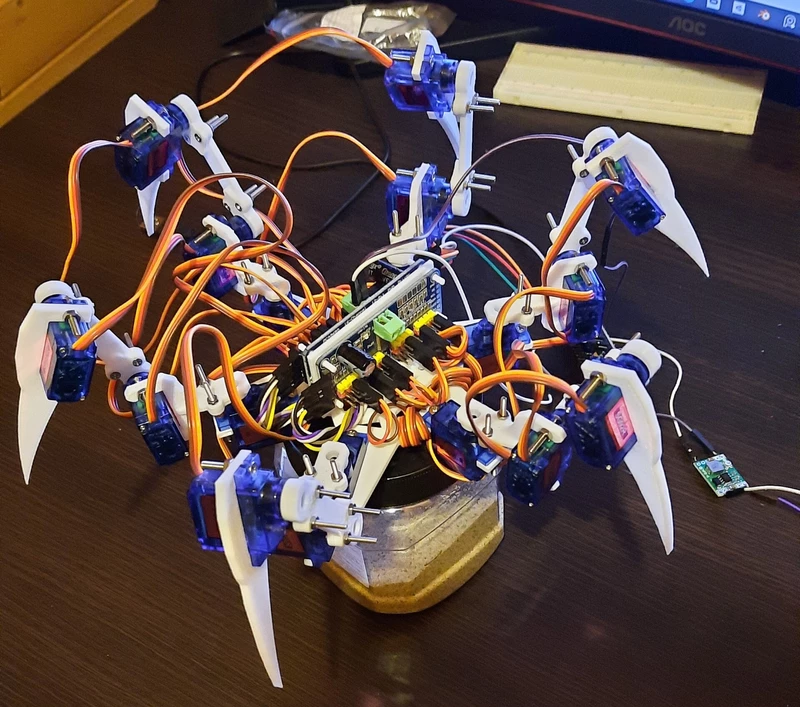
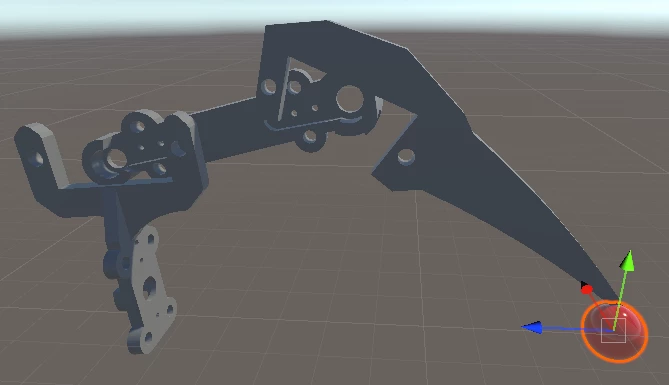
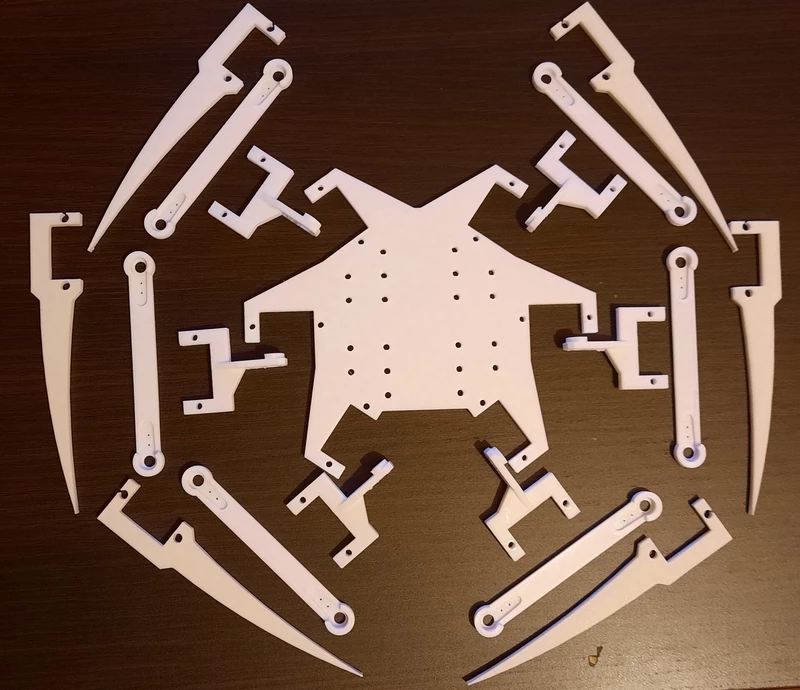
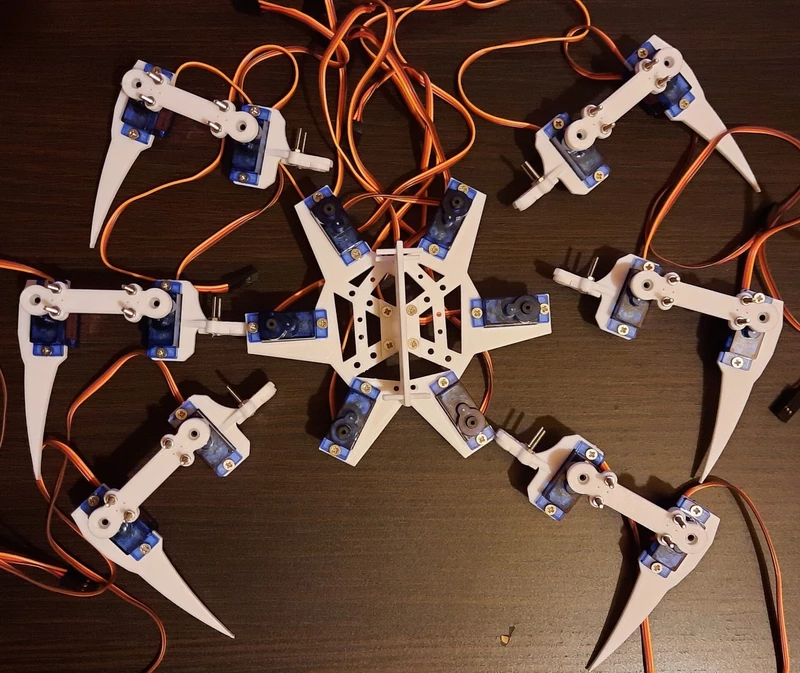
W ramach pracy wykonał model 3D robota, przeprowadził niezbędne symulacje. Elementy konstrukcji wykonał w technologii druku 3D. Obecnie największym wyzwaniem jest jak najlepsze zaprogramowanie sekwencji ruchu.
Próbowano wykorzystać algorytm FABRIK (Forward And Backward Reaching Inverse Kinematics), jednak nie dawał on zadowalających efektów.
Zdecydowano się więc na własne rozwiązanie, wyznaczając geometrię nóg dla zaproponowanych układów współrzędnych. Obecnie sekwencja ruchu składa się z trzech częśći:
Obecnie ruch hexapoda realizowany jest zgodnie z “matrycą” Wave.

2021 © Koło Naukowe Inżynier XXI wieku. Wszystkie prawa zastrzeżone.
